


Omega步进电机及驱动器
步进电机是一种将数字量脉冲转换为机械轴旋转的无刷同步电动机。 步进电机的每一转均细分为若干个离散的步(许多情况下为 200 步),执行每一步时都必须向电机发送单独的脉冲。 步进电机每次仅能执行一步,并且每一步的大小相同。 由于每个脉冲会使电机旋转一个精确的角度(通常为 1.8°),因此无需反馈机制即可控制电机的位置。 随着数字量脉冲频率的增加,步进运动逐渐变为连续的旋转,其转速直接与脉冲频率成正比。 由于步进电机具有成本低、可靠性高、低速高转矩以及结构简单坚固等特点,因此适用于几乎所有环境,在工业和商业应用中得到广泛的使用。
步进电机的优点
- 电机的旋转角度与输入脉冲成正比。
- 电机在停转时达到满转矩(如果绕组已激磁)。
- 由于好的步进电机每步精度在 3% 到 5% 之间,并且每步的误差不会积累到下一步,因此有较好的位置精度和运动重复性。
- 具有极佳的起动/停止/反转响应。
- 由于电机中无接触电刷,可靠性极高。 因此,步进电机的使用寿命仅取决于轴承的寿命。
- 步进电机对数字量输入脉冲做出响应,因而可实现开环控制,从而使电机结构得到简化并降低了控制成本。
- 负载直接耦合到转轴时,可在极低速度下实现同步旋转。
- 由于转速正比于输入脉冲的频率,因此可实现较宽的转速范围。
步进电机的类型
步进电机分三种基本类型: 变磁阻式、永磁式和混合式。 本文主要讨论混合式电机,这种电机综合了变磁阻式电机和永磁式电机的最佳特性。 混合式电机由多齿定子磁极和永磁转子组成(请参见图 A)。 标准混合式电机(如 OmegamationTM 提供的型号)有 200 个转子齿,每步的旋转角度为 1.8º。 这种电机在极高的步速下表现出较高的静态和动态转矩,因此广泛适用于各种商业应用,包括计算机磁盘驱动器、打印机/绘图仪以及 CD 播放器。 步进电机还可用于一些工业和科学应用,包括机器人、机床、贴装机、自动切线接线机以及精准流体控制设备。
步进模式
步进电机的“步进模式”包括整步、半步和微步三种。 任何步进电机的步进模式输出类型都取决于驱动器的设计。 Omegamation? 提供带有整步/半步模式可选开关的步进电机驱动器以及分辨率可由开关或软件选择的微步驱动器。
整步
标准混合式步进电机的转子齿数为 200,也就是说电机轴旋转一周需要 200 个整步。 200 步除以一圈 360º 等于整步旋转角度 1.8º。 通常,通过双绕组激磁并交替反转电流方向,可实现整步模式。 驱动器的一个数字量脉冲基本等同于一步。
半步
半步可以简单地理解为步进电机每旋转一周需要 400 步。 在这种模式中,将交替给两个绕组激磁,因此转子仅旋转一半的距离 (0.9º)。 虽然半步模式的转矩比整步模式要小约 30%,但其实现的运动更为平稳。
微步
微步模式是相对较新的一项电机技术,它可以更精细地控制电机绕组的电流,从而在两极间进一步细分出更多的位置。 Omegamation 的步进驱动器可将一个整步 (1.8º) 细分为 256 个微步,使每转的步数达到 51,200 步(0.007º/步)。 微步模式通常用于需要在较宽转速范围内实现精确定位和更平稳运动的应用。 与半步模式类似,微步模式的转矩比整步模式要小约 30%。
线性运动控制
步进电机的旋转运动可通过丝杠/蜗轮驱动系统(请参见图 B)转换为直线运动。 丝杠的导程(又称螺距)是螺丝旋转一周经过的直线距离。 如果导程等于每转一英寸并且每转有 200 个整步,则丝杠系统的分辨力为每步 0.005 英寸。 使用微步模式下的步进电机/驱动系统可以实现更为精细的分辨力。
串联与并联
步进电机有两种连接方式:串联和并联。 串联时的电感较高,因此可在低速时提供较高的转矩。 并联可降低电感,从而在较高的转速下增加转矩。
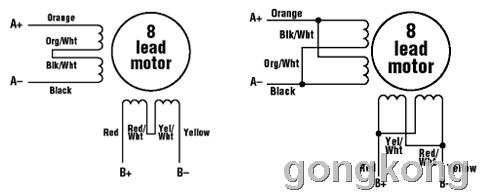
| Series connection | Parallel connection | ||
驱动器技术概览 步进电机的驱动器可从分度器或控制系统接收步进和方向信号,并将这些信号转换为用于运行步进电机的电信号。 电机轴的每一步都需要一个脉冲。 在整步模式下,标准的 200 步电机旋转一周需要 200 步脉冲。 转速与脉冲频率直接成正比。 某些驱动器带有板载振荡器,因此可通过外部模拟量信号或操纵杆设置电机转速。 分度器概览 分度器(又称控制器)可为驱动器提供步进和方向输出。 大部分应用还需要分度器额外管理其它控制功能,包括加速、减速、每秒步数和距离。 分度器还可收发并控制许多其它的外部信号。 独立操作在独立模式中,分度器可不依赖主机计算机而单独工作。 运动程序下载到非易失性存储器中后,可通过多种类型的操作员界面(例如键盘或触摸屏)进行启动,或者也可以利用辅助 I/O 输入通过开关进行启动。 独立式步进电机控制系统通常都封装有驱动器和电源,以及可选的编码器反馈,适用于需要失速检测和准确电机位置补偿的“闭环”应用。 多轴控制在许多运动应用中,都需要控制多台步进电机。 这种情况下可以使用多轴控制系统。 例如,HUB 444 网络集线器最多可以连接四台步进电机,每个驱动器连接一台单独的步进电机。 网络集线器可为需要高度同步的应用(如圆弧或直线插补)提供运动协调功能。
步进电机的选型取决于具体应用对转矩和转速的要求。 可使用电机的转矩-转速曲线(可在每个驱动器的技术参数中找到,请参见图 C 中的示例)选择适合的电机。 Omegamation 系列的每种步进驱动器均提供了其适用电机的转矩-速度曲线。 如果多种步进电机都可满足转矩和转速要求,则根据运动系统的需求(步进/方向、独立可编程、模拟量输入、微步)选择合适的驱动器,然后选择该驱动器适用的一台电机。 推荐电机清单是制造商为确保步进电机与驱动器组合具有最优性能而进行广泛测试 后所确定的。 | |||
| 步进电机驱动器的类型 | |||
| | |||
| 步进和方向 | |||
| 振荡器 | |||
| 独立可编程 | |||
| 高性能 | |||









 投诉建议
投诉建议
提交

OMEGA红外线温度计

OMEGA无纸记录仪

OMEGA 通用可编程信号发送器

OMEGACLAD™ 双对矿物绝缘(MI)电缆

OMEGA工业测量微信公众号现已隆重上线